
JY901s例程移植
最近在开发一套麦轮小车,需要用到 IMU 获取 Yaw 轴的值,保证车头的朝向不变。使用的是 维特科技 的 JY901s 模块。
该模块包含三轴陀螺仪、三轴加速度计和三轴电子罗盘,还能为客户提供高精度的三轴姿态角度(Pitch,Roll,Yaw),通过 IIC 或串口进行通信。
浅使用后,确实是一款不错的产品,从硬件到软件资料比较完备,最主要的是官方较有条理的例程库给我们今后自己写库提供了思路。
1. 上位机
直接通过串口连接模块,即可通过上位机读取姿态角数据,为了更适配个人需求,还需要在配置中进行修改。
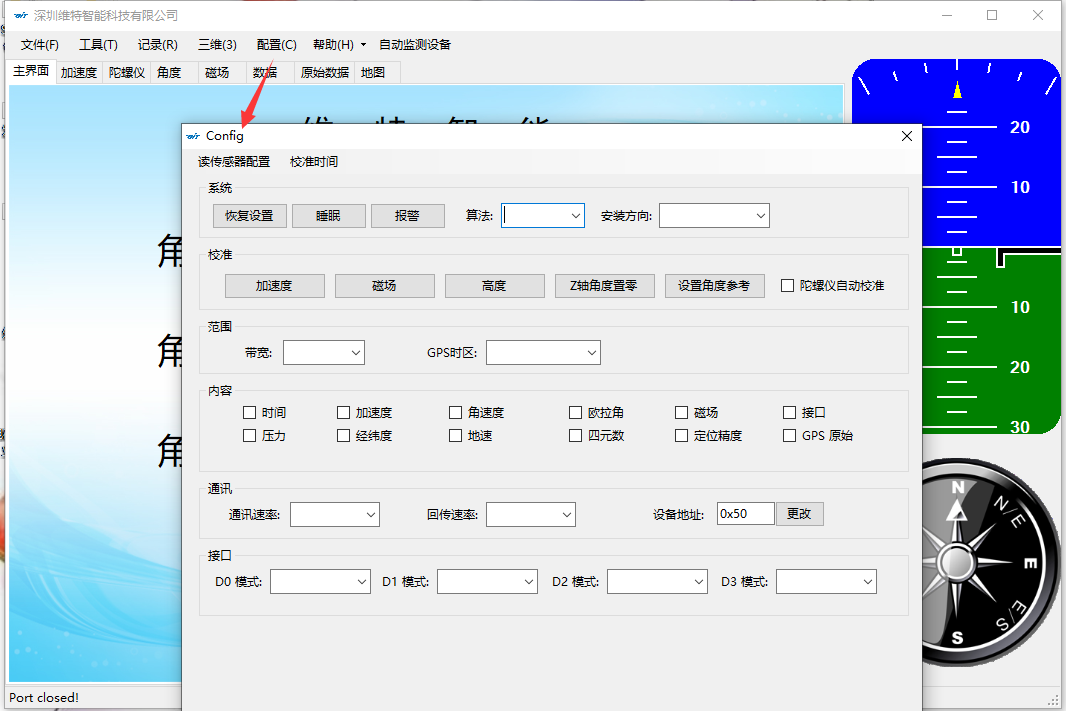
算法可以选择九轴或者六轴:
- 六轴即用三轴陀螺仪、三轴加速度计计算姿态角,但是由于 Yaw 轴的积分误差,时间长了会存在零漂。
- 九轴则加上了三轴电子罗盘,可以对 Yaw 轴进行校准。但是在使用九轴前需要进行磁场校准,否则会导致 Yaw 漂移得更离谱!
同时可以设置数据回传内容,速率等等。
2. 移植官方例程
本人选择的是 STM32Core_SDK_Normal,即串口通信。
在 main 函数中
1 | Usart1Init(115200); |
开头是初始化两个串口,一个用于与 IMU 通信,另一个和电脑通信。
接下来一行是初始化,不用管内部实现。
接下来三个是注册相关函数,通过传入函数指针,来实现与我们自己的库适配的函数。
1 | static void SensorUartSend(uint8_t *p_data, uint32_t uiSize) |
这是原来注册函数的内容,对于串口传输数据以及毫秒级延时函数,我们都可以修改为 HAL 库中相同功能的函数。
接下来看 USART2 中断函数:
1 | void USART2_IRQHandler(void) |
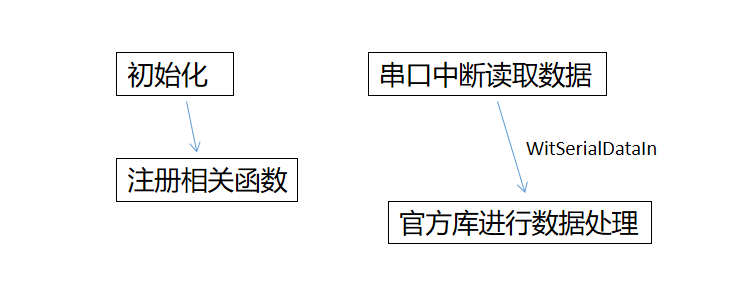
可以看到,每次接受一个数据,将数据通过 WitSerialDateIn 传入到“黑盒”中,我们在自己的中断函数也这样做就可以,之后的数据处理等一系列的东西,我们不需要了解。
最后在 while 死循环中判断是否更新数据并将数据读取。
总的工作框图如下:
3. 总结与反思
通过移植维特的例程库,我们可以从中学习到如何实现一套高内聚,低耦合历程库的方法:
- 对于与硬件相关的函数,通过函数指针进行注册相关的函数。
- 将用户与库之间数据的输入输出封装好,尽可能做到数据的处理是个黑盒。

本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 cherry's blog!